|
Yifan Liao (廖一凡) I'm a Ph.D. student at HKUST (Guangzhou). Previously, I worked as a research assistant for one year at the NUS Research Institute in Chongqing, under the supervision of Prof. Zhiyong Huang. I obtained my M.Comp. in Artificial Intelligence at National University of Singapore (NUS), where I worked closely with Prof. Yun Lin and Prof. Jinsong Dong on my master dissertation project. Before joining NUS, I received my B.Eng. in Mechanical Engineering at Chongqing University (CQU). |

|
Leading ResearchI'm interested in AI4testing and Autonomous Driving testing. Most of my research is about detecting the anomalies targeting agents. Some projects are highlighted. |
|
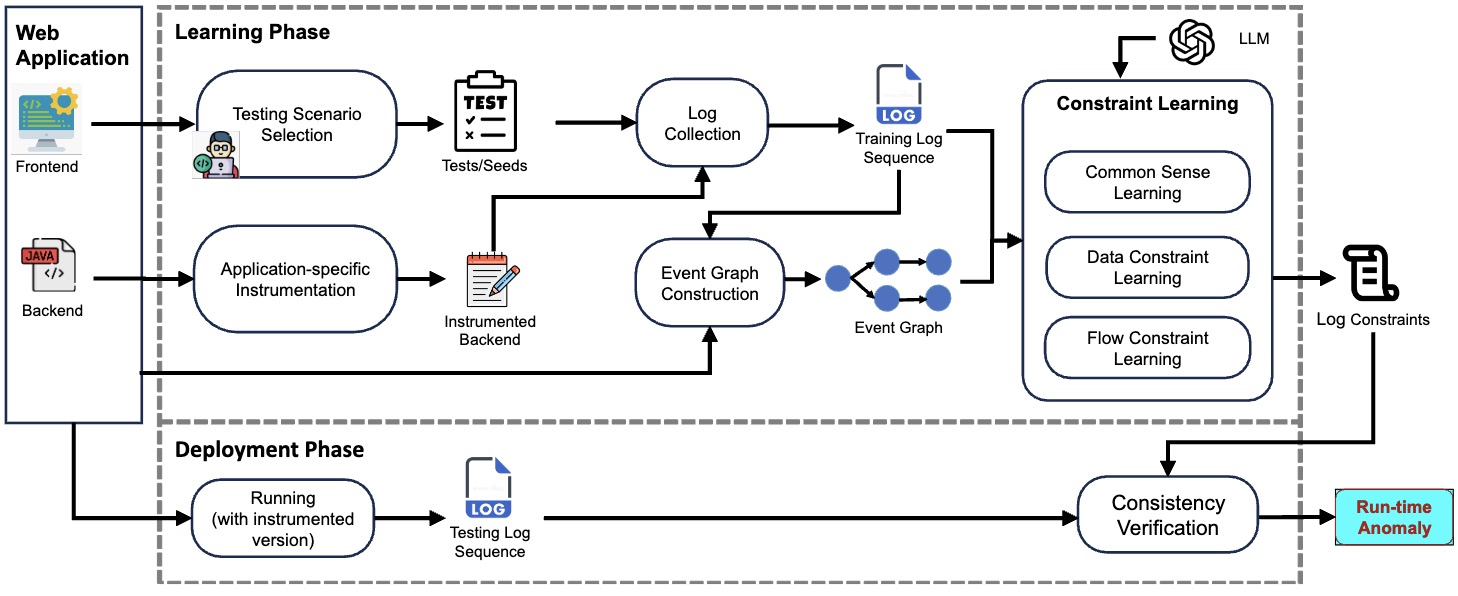
Detecting and Explaining Anomalies Caused by Web Tamper Attacks via Building Consistency-based Normality
Yifan Liao, Ming Xu, Yun Lin, Xiwen Teoh, Xiaofei Xie, Ruitao Feng, Hongyu Zhang, Jinsong Dong ASE'24 (CCF-A) Project Page | Paper This project detects and explains attack-induced anomalies in web applications by learning normal behavior at runtime using first-order logic constraints and LLM-assisted script synthesis. |
|
|
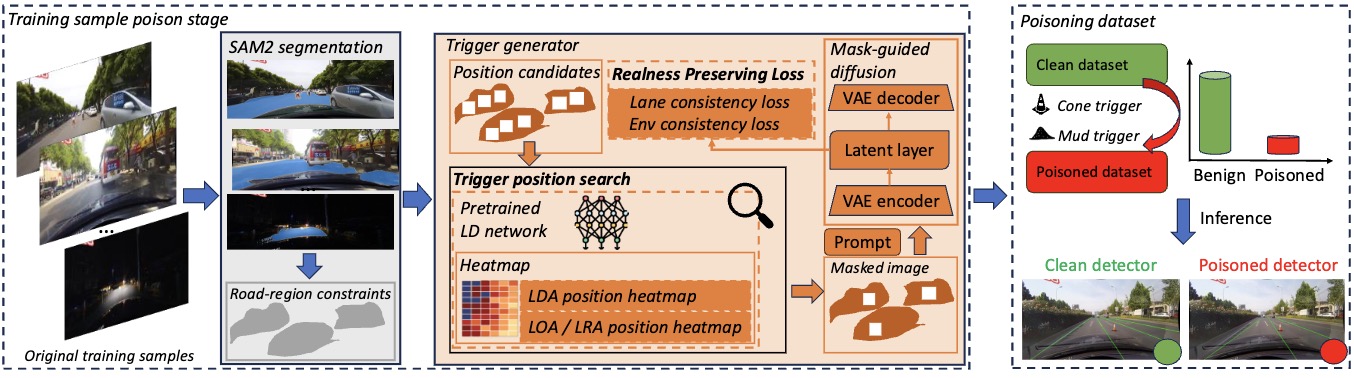
Towards Stealthy and Effective Backdoor Attacks on Lane Detection: A Naturalistic Data Poisoning Approach
Yifan Liao, Yuxin Cao, Yedi Zhang, Wentao He, Yan Xiao, Zhiyong Huang, Jinsong Dong CVPR'26 (CCF-A) Project Page | Paper We expose and evaluate backdoor vulnerabilities in lane detection via diffusion-based naturalistic data poisoning, using gradient-informed trigger placement and structure/scene-consistency losses for stealthy, effective attacks. |
|
|
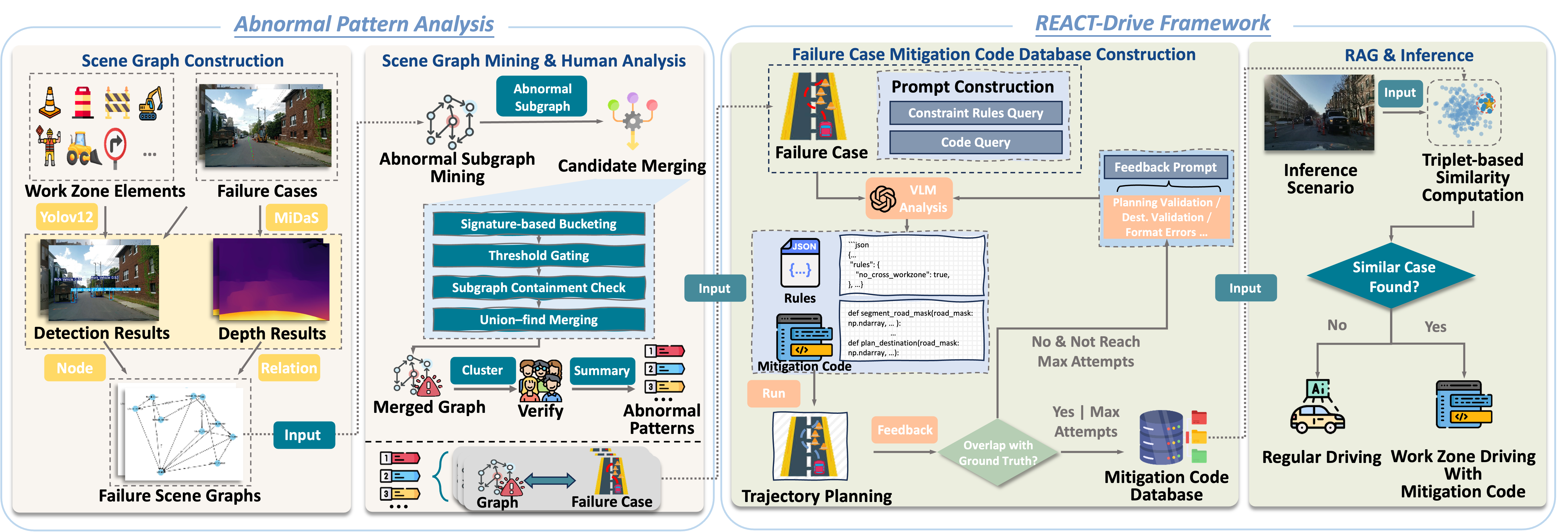
Work Zones challenge VLM Trajectory Planning: Toward Mitigation and Robust Autonomous Driving
Yifan Liao, Zhen Sun, Xiaoyun Qiu, Zixiao Zhao, Wenbing Tang, Xinlei He, Xinhu Zheng, Tianwei Zhang, Xinyi Huang, Xingshuo Han Preprint 2025 Project Page | Paper We propose REACT-Drive, a trajectory planning framework that integrates VLMs with Retrieval-Augmented Generation (RAG). Specifically, REACT-Drive leverages VLMs to convert prior failure cases into constraint rules and executable trajectory planning code, while RAG retrieves similar patterns in new scenarios to guide trajectory generation. |